laev AluDevil vööris oleva sonariga_LTMI
Author:
Eesti Mereinstituut
TÜ Eesti mereinstituudil on kasutuses 5 suuremat mereuurimislaeva, mille pikkused jäävad vahemikku 9-15 meetrit.

Kontakt: Teemar Püss (+372 580 53985; teemar.puss@ut.ee)
Registreerimisnumber: VLL-209
Pikkus/laius/süvis (m): 10,3/3,3/0,65
Meeskond/teadlased: 2/4
Ehitusaasta: 2012
Kodusadam: Tallinn, Pirita
Kasutus: veeseire ja teadusuuringud Läänemerel, vööris on mitmekiireline sonar Reson SeaBat 7101-Flow, võimalik kasutada kalasonarit Simrad EK80 broadband split-beam

Kapten: Taavi Lille (taavi.lille@ut.ee)
Pikkus/laius/süvis (m): 15/4,3/1
Meeskond/teadlased: 2/6
Ehitusaasta: 2014
Kodusadam: Pärnu
Kasutus: ihtüoloogia- ja kalandusalased uurimused ning rannikumere seire Pärnu ja Liivi lahel, kalasonari Simrad EK80 broadband split-beam võimekus

Kapten: Taavi Lille (taavi.lille@ut.ee)
Pikkus/laius/süvis (m): 15/4,2/1,2
Meeskond/teadlased: 2/6
Ehitusaasta: 2014
Kodusadam: Kallaste, s/b (stand by): Praaga
Kasutus: kalavarude uurimislaev, traal- ja mutnikupüügiks Peipsil ja Lämmijärvel

Kapten: Taavi Lille (taavi.lille@ut.ee)
Pikkus/laius/süvis (m): 10,35/3,4/1,0
Poordi kõrgus: 2 m
Kaatri tüüp: Kulkuri 34
Meeskond/teadlased: 1/7
Ehitusaasta: 2003
Kodusadam: Pärnu
Kasutus: mitmetalituslik, võrgumasin, kraana, kalasonar Simrad EK80 broadband split-beam

Kapten: Taavi Lille (taavi.lille@ut.ee)
Pikkus/laius/süvis (m): 8,8/3,2/0,48
Opereerimiskiirus: 20-25 sõlme
Ehitusaasta: 2024
Kodusadam: Pärnu
Kasutus: mitmetalituslik, võrgumasin, kalasonar Simrad EK80 broadband split-beam
Lisaks laevadele on Eesti mereinstituudil mitmeid väiksemaid 3-8 meetriseid RIB-, plastik- ja alumiiniumpaate/kaatreid.
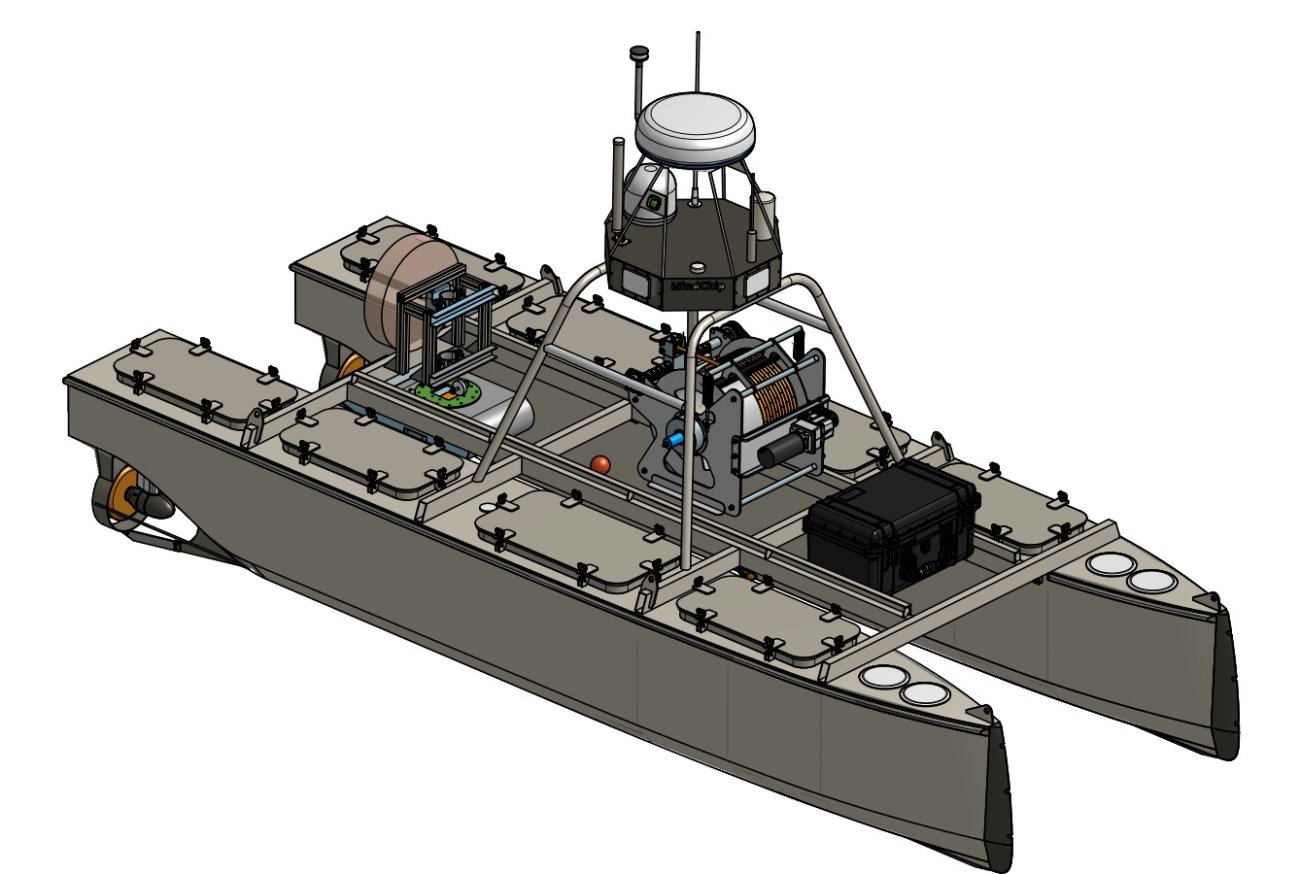
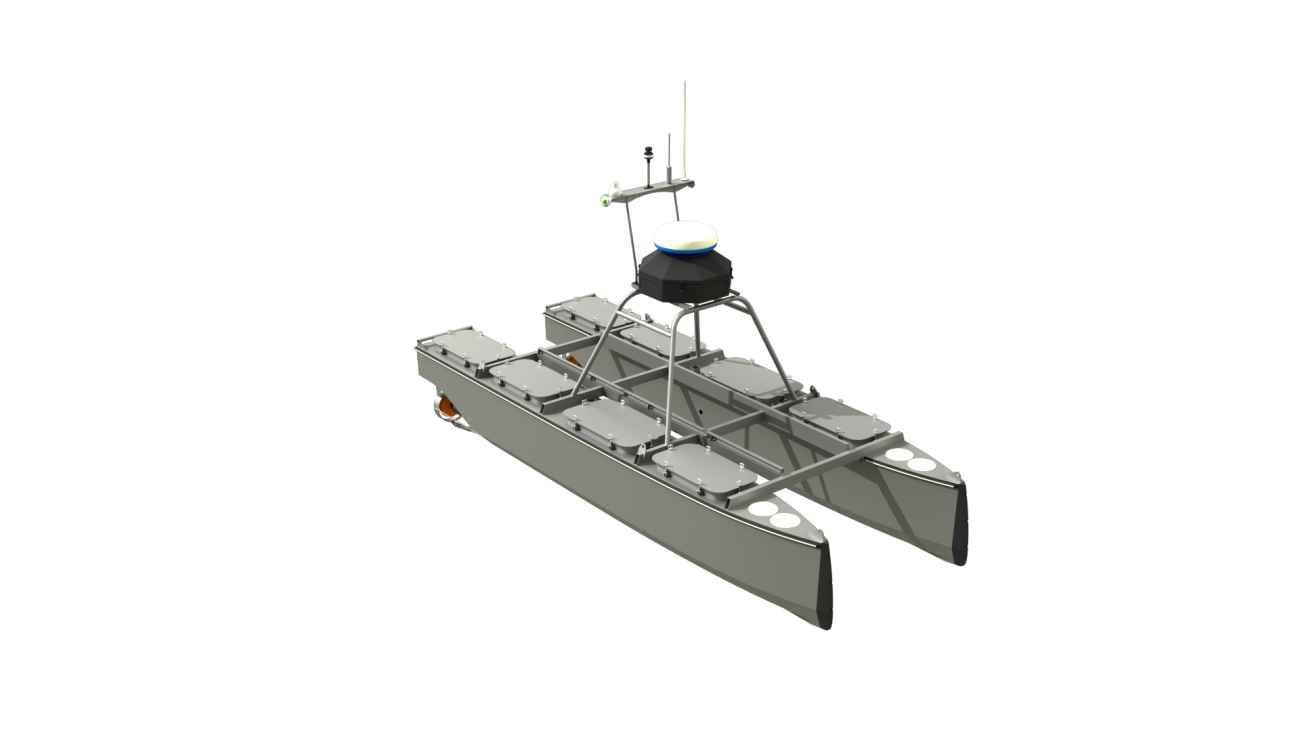
Eesti mereinstituudil valmis 2023. aastal mehitamata robotlaev "Heli", mis on võimeline iseseisvalt navigeerima vastavalt etteantud teekonnale või sõitma vastavalt võrgu kaudu reaalajas saadetud juhistele. Alus salvestab ja edastab reaalajas andmeid enda positsiooni, reisi parameetrite ja sonari abil leitud kalaparvede kohta. Robotlaeva saab kulutõhusa lahendusena kasutada teadusuuringutel kalaparvede parameetrite kirjeldamisel või ka töönduspüügi suunamisel. Võrreldes mehitatutega on robotlaev oluliselt keskkonnasõbralikum, säästlikum ja ohutum alus teadusuuringute läbiviimiseks ja kalapüügi toetamiseks.
Pikkus/laius/süvis (m): 6,2/2,5/0,4
Maksimaalne kiirus: 7 kn
Töökiirus: 3 kn
Tööulatus: 300 km
Ühilduvus: 5G, 4G, 433 MHz, WIFI, AIS, satelliit
Sensorid: radar, kaamera, magnetomeeter, anemomeeter, güroskoop, sonar
Ohutusvarustus: AIS, radaripeegeldi, navigatsioonituled
Kontakt: Elor Sepp (+372 521 7789, elor.sepp@ut.ee)
Viited: