bentoseproovi võtmine Van Veen kopaga uurimislaeval Salme_LTMI
Author:
Jekaterina Jefimova
TÜ Eesti mereinstituut omab kaasaegset ning väga mitmekesiseid mereuuringuid võimaldavat tehnilist võimekust.

Ekman ja Van Veen tüüpi põhjaammutajate ehk settekoppadega kogutakse zoobentose ja põhjasette proovi pehmetelt (liivastelt, mudastelt, savistelt) merepõhjadelt.

Taimeraam on vahend sukeldumismeetodil põhjataimestiku proovi kogumiseks.

Juday tüüpi planktonivõrguga saab koguda veesambast zooplanktoni proovi.
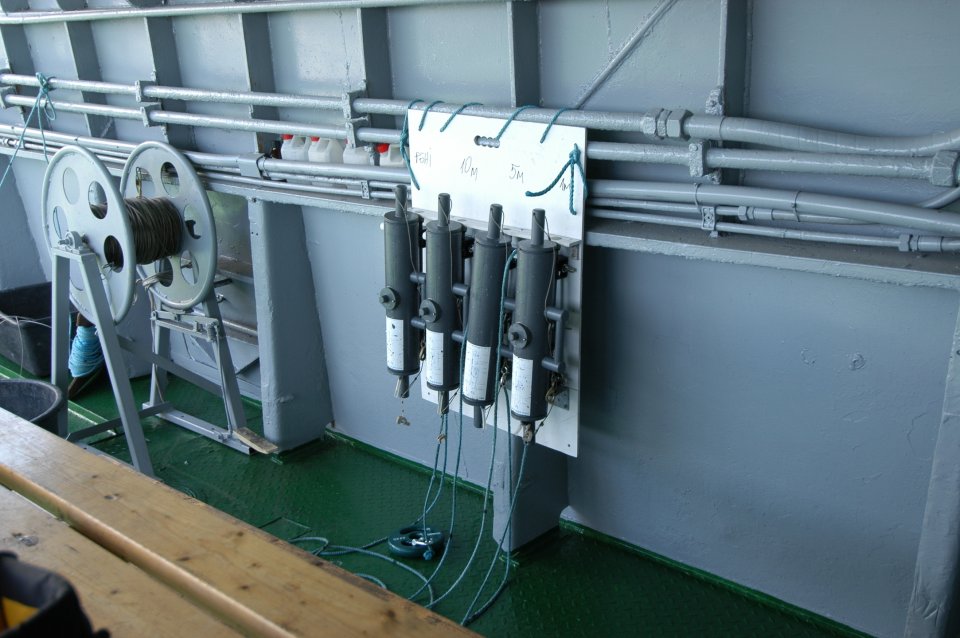
Batomeetritega võetakse veesamba erinevatelt sügavustelt veeproovi (vee keemiliseks analüüsiks, fütoplanktoni proovi kogumiseks, klorofüll a sisalduse määramiseks).

Mereinstituudi inventari hulka kuuluvad firma Geospectrum'i veealused kõlarid ja võimendi, mida saab kasutada näiteks töötavate tuugenite müra sarnase heli tekitamiseks, mille kaudu saab uurida töötavate meretuulikute võimalikku mõju pelaagilistele kaladele.
Seadmeid kasutatakse projektis "Eksperimentaalne uuring müra mõjust pelaagilistele kaladele" (rohkem infot: ETIS).
Kontakt: Mehis Rohtla (mehis.rohtla@ut.ee)

Allvee-videosüsteem („drop“ kaamera) on paadist merepõhja lastav videosüsteem, mis koosneb kaabliga ühendatud veealusest videokaamerast ning paadis olevast salvestusseadmest).

TÜ Eesti mereinstituudi mereuuringutes on lisaks drop-kaameratele kasutusel firma SeaBotix ROV (remotely operated underwater vehicle), mudel LBV 200.

Nii allvee-videosüsteem kui ROV on varustatud valgustitega ja videosalvestusseadmetega. Igas proovipunktis salvestatud videolõigud analüüsitakse hiljem visuaalselt arvutimonitorilt vaadatuna. Videopildilt hinnatakse protsentuaalselt põhjataimestiku üldkatvus, põhjataimestiku ja –loomastiku liigiline koosseis ja katvused ning põhjasubstraadi tüüpide katvused.
Kontakt: Teemar Püss (tel. +372 580 53985; teemar.puss@ut.ee) / Martin Teeveer (tel. +372 6718972; martin.teeveer@ut.ee)

Lisaks omab Eesti mereinstituudi kaugseire ja mereoptika osakond GPS-iga varustatud mehitamata veepinnarobotit Surfbee, millele paigaldatud videosüsteemiga saab teostada veealuseid videovõtteid. Samuti saab roboti külge panna mõõdistusi teostama erinevaid andureid.
Kontakt: Tiit Kutser (tiit.kutser@ut.ee)
Tartu Ülikooli Eesti mereinstituudis on kasutusel operatiivmõõtmiste süsteem FerryBox. FerryBox'i all mõistetakse regulaarliinidel kasutatavat läbivoolumeetodil põhinevat automaatset mõõtmis- ja proovikogumissüsteemi.
FerryBox seirega tehakse hüdroloogilisi pidevmõõtmisi AS Tallinki parvlaevadelt ja võetakse proove parvlaevaliinide marsruutidel Tallinn-Stockholm ja Tallinn-Helsingi.
Mõõdetavad parameetrid:
Pidevmõõtmistel (igal parvlaeva ülesõidul) määratakse automaatselt vee pinnakihi temperatuur (°C), soolsus (PSU), klorofüll a fluorestsentsi (suhteline ühik) ja kui võimalik, siis ka lahustunud orgaaniline aine (CDOM).
Automaatseadmetega kogutakse veeproove 4-5 m sügavuselt ja laboratoorselt määratakse järgmised näitajad:
• fütoplanktoni liigiline koosseis, biomass (mg/m3) ja summaarne biomass (mg/m3), arvukus (ühikut/l) ja summaarne arvukus (ühikut/l);
• klorofüll a sisaldus (µg/l), klorofüll a fluorestsents (a.u.);
• toiteainete (Nüld, NO2+NO3, Püld, PO4, SiO4) kontsentratsioon (µmol/l).
Milleks on selliseid andmeid vaja?
Operatiivselt kogutud andmed võimaldavad kiirelt anda infot meres toimunud sündmuste kohta nii avalikkusele kui keskkonnaalaseid otsuseid vastuvõtvatele ametnikele. FerryBox seire on alternatiiviks traditsioonilisele mereseirele, mille käigus suudetakse vajaliku sagedusega katta vaid väike osa rannikulähedasi piirkondi. Traditsioonilise mereseirega võrreldes on FerryBox käigushoidmine ka tunduvalt odavam. FerryBox seire puuduseks on, et meres toimuvad protsessid on jälgitavad vaid pindmises veekihis. Nagu eelpool mainitud, on FerryBox seire üks osa rannikumere seirest, mille tulemusena saab anda hinnangu rannikumere keskkonnaseisundile ning jälgida pikaajalisi muutusi. Muuhulgas on FerryBox seire andmeid kasutatud suviste vetikaõitsengute ennustamiseks.
Kontakt: Andres Jaanus (andres.jaanus@ut.ee)
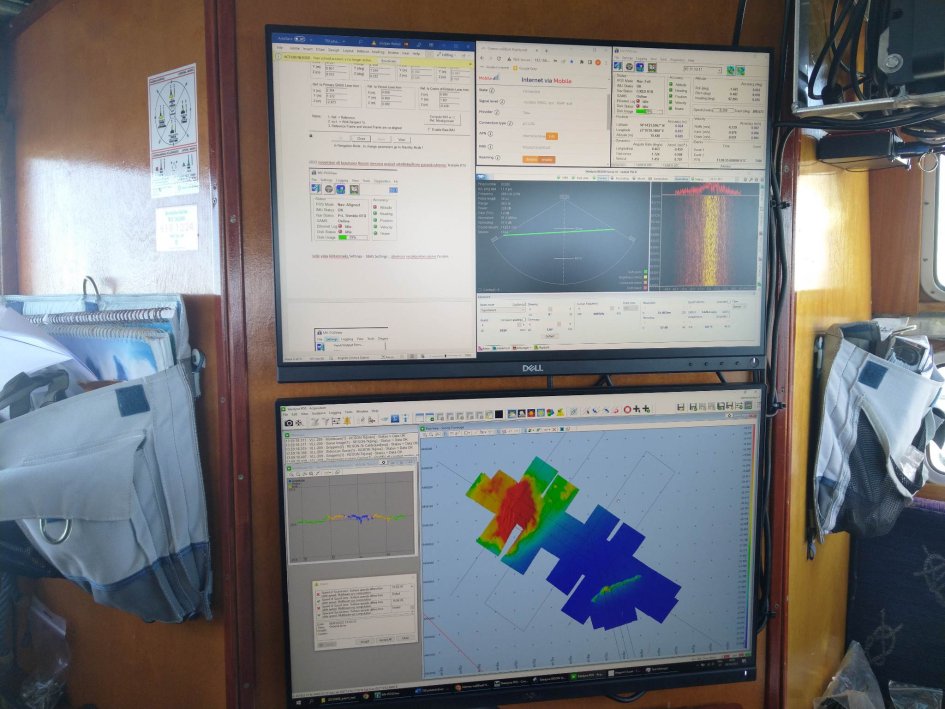
Eesti mereinstituudil on merepõhja elustiku ja elupaikade kaardistamiseks mitmekiirelised ehk lehviksonarid Reson SeaBat T50 ja Reson SeaBat 7101-Flow. Sonarid skaneerivad merepõhja ning annavad andmeid nt sügavuse, tagasihajumise, sügavusest arvutatud merepõhja kalde kohta.

Sonari kasutamine võimaldab võrreldes tavapärase ainult merepõhja punktvaatlustel põhineva kaardistamisega väga palju suuremat täpsust: võrreldes interpoleerimisega võimaldavad sonariga kogutud andmed äärmiselt palju täpsemalt ennustada elustiku ja elupaikade levikut reaalsete merepõhja punktvaatluste vahelisel alal.
Sonari tööpõhimõte seisneb aja mõõtmises helilaine väljumisest kuni veekogu põhjalt tagasi peegeldunud laine registreerimiseni sonaris, mille kaudu arvutatakse vahemaa ehk sügavus. Vahemaa arvutamise eelduseks on heli levimise kiiruse andmed, mida salvestatakse eraldi sensoritega. Lisaks heli tagasipeegeldumise ajale salvestab sonar ka peegelduse tugevuse. Seega on sonariga võimalik koguda kahte tüüpi andmeid – sügavus ja tagasipeegeldunud akustilise signaali intensiivsus (edaspidi „tagasihajumine“). Sügavus on merepõhja elustiku ja elupaikade kaardistamisel kõige olulisem keskkonnamuutuja kahel põhjusel: 1) kõikide taimeliikide ja paljude loomaliikide levik on seotud sügavusega, 2) sügavusandmetest on võimalik arvutada merepõhja nõlvakaldeid ja konarlikkust, mis peegeldavad merepõhja substraadi omadusi ja läbi selle elustiku ja elupaikade levikut. Tagasihajumine võimaldab hinnata merepõhja omadusi, sest helilaine sumbumine ja peegelduse tugevus sõltub substraadi materjalist ja pinna struktuurist. Tagasihajumine on tugevam kõvalt substraadilt (nt paeplaat) ja nõrgem pehmelt substraadilt (nt liiv).
Detailsema ülevaate sonari kasutamisest merepõhja elustiku ja elupaikade kaardistamisel annab Keskkonnainvesteeringute Keskuse rahastatud projekti „Sonarisüsteemi rakendamise metoodika loomine merepõhja elupaikade ja füüsikaliste omaduste kaardistamiseks“ käigus valminud aruanne (TÜ Eesti mereinstituut, 2014 a.).
Kontakt: tehniline info - Teemar Püss (tel. +372 580 53985; teemar.puss@ut.ee) / andmeanalüüs - Kristjan Herkül (kristjan.herkul@ut.ee)
Erinevatele mereinstituudi uurimisalustele on paigaldatud sonarid Simrad EK80 broadband split-beam, mis skaneerivad kogu veesammast ning võimaldavad seal paiknevate organismide kohta andmete kogumist. Peamiselt on sonarid kasutusel kalavarude koguse ja paiknemise kaardistamisel, kuid võimalus on kaardistada ka teisi pelaagilisi organisme, mille tihedus erineb veest. Mereinstituut tegeleb sonarite abil peamiselt kalavarude suuruse (püügisoovituste koostamiseks) ja rännete uurimisega (teadustööd, rajatiste mõjude uuringud).
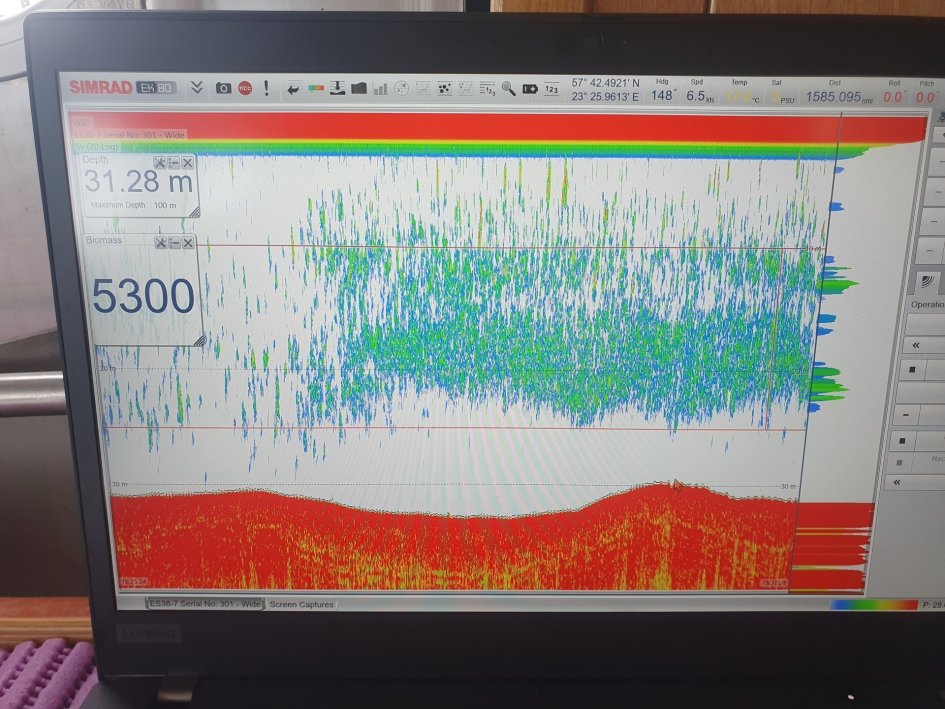
Sonarid võimaldavad kiiret ja efektiivset kalavarude suuruse ja paiknemise kaardistamist võrreldest tavapäraste invasiivsete meetoditega (nt traalpüük, võrgupüük jne). Pelaagiliste kalavarude hindamisel on sonarid kasutusel olnud juba aastakümneid ning koos tehnika arenguga on ka nende kasutusvaldkond ja täpsus oluliselt suurenenud. Sonari poolt tekitatud helilaine tagasipeegeldumisest on võimalik hinnata nii kalade kogust kui ka nende suurust. Erinevate sageduste kombineerimine võimaldab kaardistada erinevaid ökosüsteemi komponente ning eristada kalu ja planktonit.
Kontakt: Elor Sepp (tel: +372 521 7789; elor.sepp@ut.ee)
Autonoomsete allveeinstrumentidega on Eesti mereinstituut suuteline mõõtma selliseid parameetreid nagu vee temperatuur, soolsus, hapniku kontsentratsioon, valguse intensiivsus, vee läbipastvus, hoovuste kiirus ja suund, taimse hõljumi sisaldus. Seda võimaldavad teostada Eesti mereinstituudis näiteks:
Eesti mereinstituudis töötavad erineva sukeldumisvõimekusega sukeldujad, kes omavad rahvusvahelisi sukeldumislitsentse OWD, AOWD ja Rescue Diver.

Kontakt: Kaire Kaljurand (kaire.kaljurand@ut.ee)




